Robotic Human Palm Replication
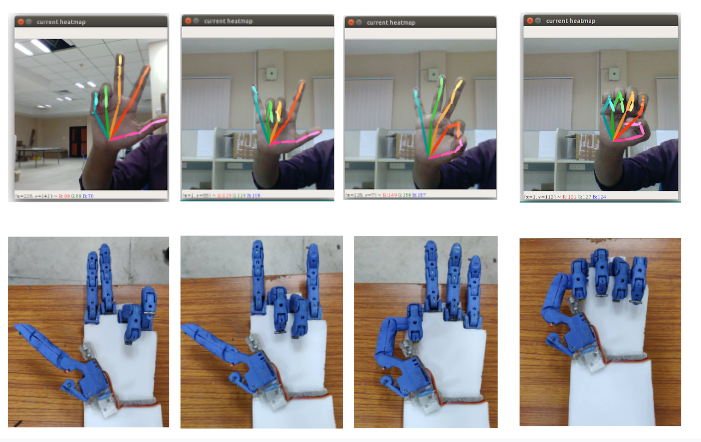
The project goal was to design a working model of a human palm and to replicate the palm motion and controls using a video feed of a human palm using cameras.The design consists of four fingers and a thumb attached on a palm base. Eachfinger consists of three smaller components, and the thumb is made of two components, similar to a real human palm. All the fingers have a string making a loop within each finger and connecting all these smaller components, while the other end of the string goes around a motor. Each of the four fingers are connected to a motor each. The thumb is connected to two motors giving it two degrees of freedom. All the motors are controlled by an Arduino. We achieved pose estimation using a three stage convolutional pose machines(CPMs) built on tensorflow-python and kalman filters resulting in higher resolution and accuracy.